ヘビ型ロボット
受動輪型
概要
いろいろあってなんとなくうねうねさせたくて作った。タイヤに動力はなく、胴体のうねうねだけで推進する。
駆動輪型
概要
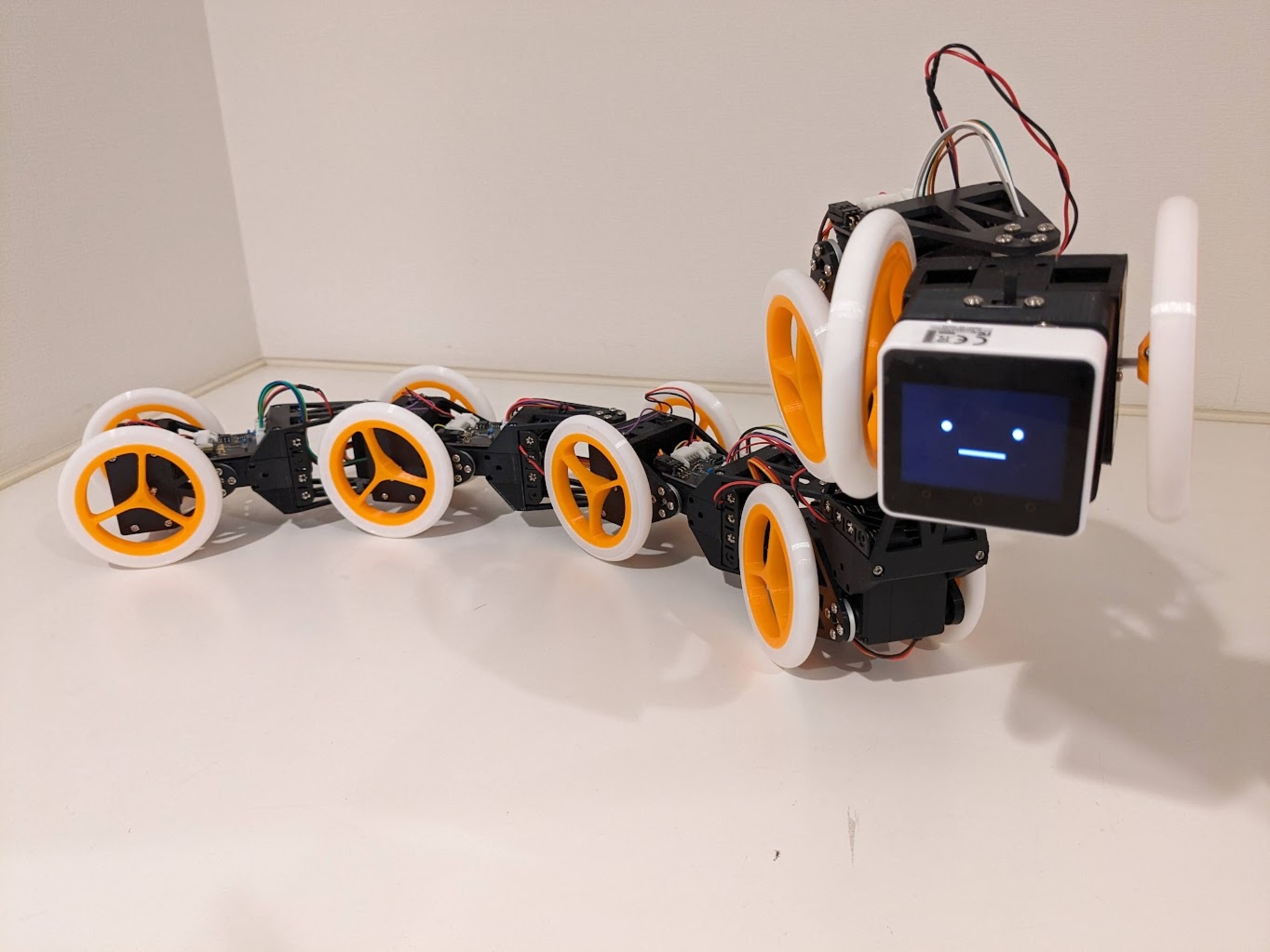
タイヤに動力がついた駆動輪型のヘビ型ロボット。シリアルサーボをケチってPWMのサーボにマイコン(CH32V003F4P6)を載せてシリアル通信してみたが、紆余曲折あって結局高くついてしまった。
1つのCH32V003でヨーピッチの2軸と、推進用モータ左右2個の4つのモータを担当している。メインのコントローラはM5Stack Core2で、インターネット露出用に顔をつけた。